Друзья, всех неравнодушных к моему вопросу, хочу поблагодарить за помощь. Отдельную благодарность хочу выразить MaxiMarker. Данное подключение заставило вращаться ось, за что огромное спасибо. Так что вопрос считаю закрытым. Но появился еще один вопрос, правда уже не совсем по теме оси (может стоит создать отдельную тему). Вопрос относительно маркировки на цилиндрах. Вместе с платой и драйверами пришла на диске программа Ezcad верcии 2.14.10 (20180103). В ней обнаружил для себя ряд полезных нововведений, так как до этого работал на версии 2.7.6. Ну и одной из «фишек» в плагине RotaryMark, в параметрах (F3) появились галочки Scale comp., Space comp., Shear comp. Мануала для этой версии не нашёл (а тот что идет в комплекте с софтом только на китайском, а гугл еще тот переводчик), ну и естественно не отслеживал с какой версии данные настройки появились, поэтому осмелюсь предположить что эти параметры предназначены для устранения так называемых разрывов при гравировке на осях вращения, которые характерны при использовании некачественных патронов. Но изменив данные параметры особых изменений не увидел. Возможно мое предположение ошибочно. Есть ли хоть какая информация по этому вопросу?
") На резисторы не обращайте внимания - их нужно подключать, если на драйвер подаётся напряжение больше 5 Вольт.
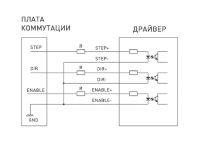
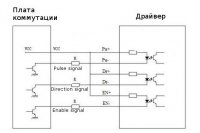
На резисторы не обращайте внимания - их нужно подключать, если на драйвер подаётся напряжение больше 5 Вольт.